07-CG-Curves
Bezier Curve
Linear Bezier curve (
which represents a straight - line segment between two control points
Quadratic Bezier curve (
Cubic Bezier curve (
with four control points
Power basis:
Geometry:
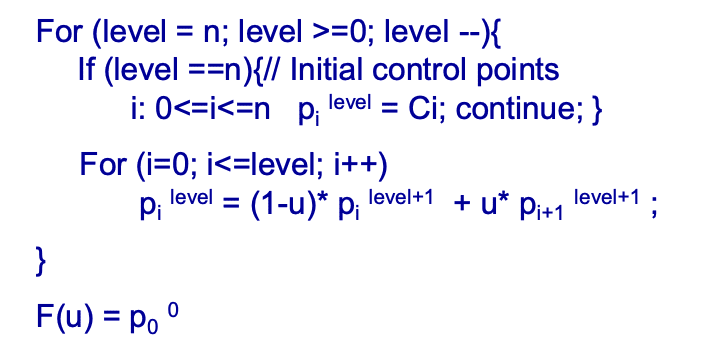
DeCasteljau Implementation
- Input: Control points Ci with 0<=i<=n where n is the degree.
- Output: F(u) where u is the parameter for evaluation
def decasteljau(control_points, u):
"""
Evaluate a point on a Bézier curve using the DeCasteljau algorithm.
Parameters:
control_points (list of tuples): List of control points (x, y) for the curve.
u (float): Parameter value in [0, 1] to evaluate the curve at.
Returns:
tuple: The resulting point (x, y) on the Bézier curve.
"""
n = len(control_points) - 1 # Degree of the curve (n = len(control_points) - 1)
points = [list(point) for point in control_points] # Convert to mutable lists
# Iterate from the highest level down to level 0
for level in range(n, 0, -1): # Levels: n, n-1, ..., 1
for i in range(level):
# Linearly interpolate between consecutive points at the current level
x = (1 - u) * points[i][0] + u * points[i + 1][0]
y = (1 - u) * points[i][1] + u * points[i + 1][1]
points[i] = [x, y] # Update the point for the next level
return tuple(points[0]) # Return the final point as a tupleBernstein-Bezier polynomial basis
- Linear combination of basis functions: Bezier curves are expressed as a linear combination of Bernstein
- Bezier polynomials. For a curve of degree
, it is given by - where
are the control points that influence the shape of the curve, is the parameter, and $$B_{k}^{n}(u)=\frac{n!}{k!(n - k)!}(1 - u)^{n - k}u^{k}$$ are the Bernstein - Bezier polynomials.
Key Properties
Interpolation at end-points, but approximation at other points
- Global Influence: Single piece, moving one point affects whole curve (no local control as in B-splines later)
- Geometric Invariance: Invariant to translations, rotations, scales etc.That is, translating all control points translates entire curve.
- Ease of Subdivision: Easily subdivided into parts for drawing: Hence, Bezier curves easiest for drawing
Interpolation Curve – over constrained cause lots of (undesirable) oscillations
Approximation Curve – more reasonable
Polar form labeling (blossoms)
Labeling trick for control points and intermediate deCasteljau points that makes thing intuitive
Why Polar Forms:
- Simple mnemonic: which points to interpolate and how in deCasteljau algorithm
- Easy to see how to subdivide Bezier curve which is useful for drawing recursively
- Generalizes to arbitrary spline curves
Termination Criteria
a. Geometric Tolerance (Most Common)
- Criterion: The distance between the start and end points of the curve segment is smaller than a predefined tolerance (
ε).- Rationale: When the curve segment is sufficiently "straight" (or close to a line), it can be approximated by a straight line segment for rendering.
b. Recursion Depth Limit
- Criterion: The number of recursive subdivisions exceeds a maximum allowed depth (e.g.,
max_depth).- Rationale: Prevents infinite recursion due to numerical errors or pathological cases (e.g., curves that never flatten sufficiently).
c. Screen Space Error
- Criterion: The projected length of the curve segment on the screen is smaller than a single pixel.
- Rationale: Used in computer graphics to match the display resolution (e.g., 1 pixel error is visually imperceptible).
Pseudo Code for Recursive Subdivision Rendering
Below is a generic pseudo code for rendering a Bezier curve via recursive subdivision, using geometric tolerance as the termination criterion.
RENDER_BEZIER(control_points, tolerance, current_depth, max_depth):
if NUMBER_OF_CONTROL_POINTS(control_points) == 2:
// Base case: line segment, draw directly
DRAW_LINE(control_points[0], control_points[1])
return
// Check termination criteria
if DISTANCE(control_points[0], control_points[-1]) < tolerance OR current_depth > max_depth:
// Approximate with a line segment
DRAW_LINE(control_points[0], control_points[-1])
return
// Subdivide the curve using de Casteljau algorithm
u = 0.5 // Subdivide at the midpoint (common choice, but u can be any parameter)
left_control_points, right_control_points = DECASTELJAU_SUBDIVIDE(control_points, u)
// Recurse on left and right segments
RENDER_BEZIER(left_control_points, tolerance, current_depth + 1, max_depth)
RENDER_BEZIER(right_control_points, tolerance, current_depth + 1, max_depth)Bezier:Disadvantages
- Single piece, no local control
- Complex shapes: can be very high degree, difficult
- Continuity defects during segmented splicing
Continuity definitions
continuous - Curve/surface has no breaks, gaps, or holes.
continuous - Tangent at joint has the same direction.
continuous - Curve/surface derivative is continuous.
- Tangent at joint has the same direction and magnitude.
continuous - Curve/surface through
derivative is continuous. - Important for shading.
- Curve/surface through
Relationship Between the # of control points, and the # of cubic Bézier subcurves:
Let:
= number of cubic Bézier subcurves, = total number of control points.
Formula:
B-spline curves
- Cubic B-splines have
continuity, local control - Curve is not constrained to pass through any control points
- 4 segments per control point, 4 control points per segment
- Knots where two segments join: Knotvector
- Knotvector uniform/non-uniform (we only consider uniform cubic B-splines, not general NURBS)
- BSpline: uniform cubic BSpline
- NURBS: Non-Uniform Rational BSpline
- non-uniform = different spacing between the blending functions, a.k.a. knots
- rational = ratio of polynomials (instead of cubic)
Polar Forms: Cubic Bspline Curve
- Labeling little different from in Bezier curve
- No interpolation of end-points like in Bezier
- Advantage of polar forms: easy to generalize